研究・技術開発紹介

遠隔操作無人探査機による水中構造物診断システム ~ROV*を利用した水中調査ロボットによる大水深構造物の診断技術~
背景
社会インフラを巡っては、多くの施設で老朽化が進んできており、効率的・効果的な維持管理が求められています。特に、ダム堤体などの水中の構造物では、安全面からも効率面からも大水深域部分の目視による老朽化調査が難しいという問題があります。
水中構造物診断システムの開発
このような背景を踏まえ、当社では、遠隔操作無人探査機による水中構造物診断システムの開発に取り組んでおり、国土交通省が公募した「次世代社会インフラ用ロボット技術・ロボットシステム 水中維持管理技術」に応募し、2014年11月に宮ヶ瀬ダムにおいて現場検証試験を行いました。
現場検証試験を行ったシステムは、大水深構造物の健全性調査・診断を行う技術であり、ROVを利用した水中調査ロボット技術と計測データの解析による健全性評価技術により構成されています。
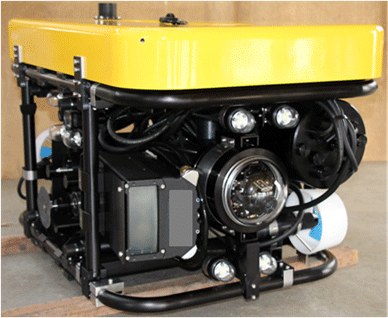
ROVを利用した水中調査ロボット(Cetus-V)
ROVを利用した水中調査ロボット(Cetus-V)は、水深150mまでの耐水圧性能を有しており、船上などからの遠隔操作による無人潜航、設定深度・方位でのスラスタ制御による位置保持や伸縮ロッドによる傾斜面などへの位置保持が可能です。また、計測用の光学カメラや音響カメラによる画像取得、調査箇所の清掃、鋼材の肉厚測定やコンクリートの打音検査が可能です。
計測データは、リアルタイムでパソコンなどに取り込まれ、画面などで確認できるとともに、調査後に詳細な解析を行い、構造物の健全性を評価することが可能です。
現地検証試験状況(動画)
今後は、ダムにおけるゲート設備や堤体などのコンクリート構造物などをターゲットに、本現地検証試験とその評価結果を通じて、技術の改良を進めていく予定です。また、海洋・港湾構造物における大水深域の構造物においても、ダムと同様に効率的・効果的な診断技術が求められており、本技術の海域への展開も予定しています。
将来的には、ROVに搭載する検査装置の高度化や自律潜航技術の開発などを進め、様々な大水深域の構造物へ適用できるように、本技術の汎用性を高めていきます。
開発者のコメント
将来の海洋開発、大規模水中施工における人の目や耳、さらには手足の代わりになるロボット開発に着手しました。五洋建設が得意とする水中遠隔機械化施工の高度化を目指して取組んでいます。
実績
国土交通省「次世代社会インフラ用ロボット技術・ロボットシステム 水中維持管理技術」
*ROV(Remotely operated vehicle):遠隔操作無人探査機の略称
